









REACH M2/M+
RTK GNSS modules
for UAV mapping
Positioning with centimeter accuracy in RTK and PPK.
For precise UAV mapping with less GCP
Why camera synchronization is so important
Usually autopilot triggers the camera and records the coordinate it has at that moment. When the drone is flying at 20 m/s and GPS works at 5 Hz, that means your autopilot will have position readings only each 4 m, which is not suitable for precise georeferencing. In addition, there is always a delay between the trigger and the actual moment the photo is taken.
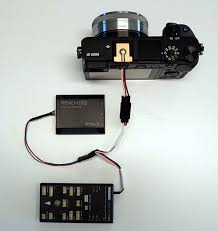
Reach eliminates the delay
Reach solves the problem of positioning by connecting directly to the camera hot shoe port, which is synced with the shutter. The time and coordinates of each photo are logged with a resolution of less than a microsecond. This method allows GCPs to be used only to check your accuracy.
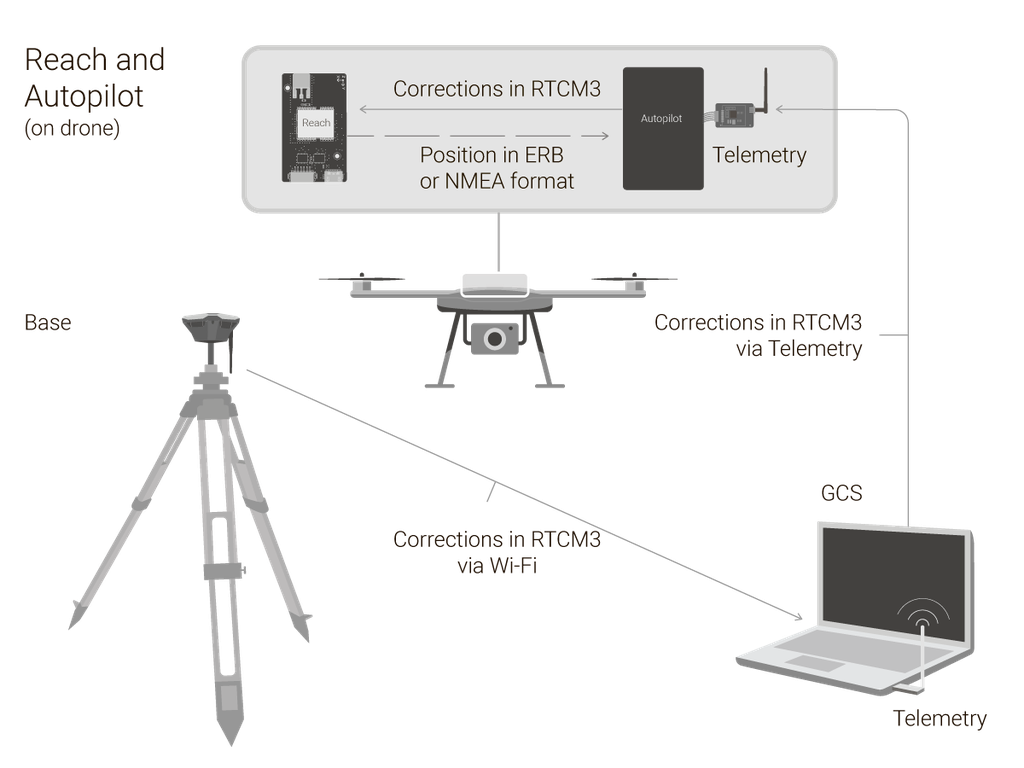
NTRIP or another Reach as a base station
To calculate centimeter-precise coordinates in PPK and RTK, Reach needs corrections from a base station. It could be either another Reach receiver or an NTRIP service. VRS is also supported.
Compatibility
Reach M2 and M+ work seamlessly with other Reach receivers over any link and are compatible with any other receiver that supports RTCM3 and NTRIP.
Choosing between
Reach M+ and Reach M2
Reach M+
and Reach RS+
If you work within short baselines, then Reach M+ is an optimal choice.
Reach M2
and Reach RS2
Provides robust performance and quick initialization, allowing work on long baselines.
RTK
Up to 10 km
Up to 60 km
PPK
Up to 20 km
Up to 100 km
Time to fix
1-2 min
5 sec
Frequency bands
Single-band
Multi-band
RINEX logging update rate
Up to 14 Hz
Up to 20 Hz*
*coming with a software update,
up to 10 Hz now
![[J-Ant-Tr2-1] JAVAD TRIUMPH-2 GNSS Receiver (Base)](/web/image/product.product/2797/image_256/%5BJ-Ant-Tr2-1%5D%20JAVAD%20TRIUMPH-2%20GNSS%20Receiver%20%20%28Base%29?unique=a4dd3aa)
![[J-Ant-TLS-1] JAVAD TRIUMPH-LS GNSS Receiver (Base)](/web/image/product.product/3029/image_256/%5BJ-Ant-TLS-1%5D%20JAVAD%20TRIUMPH-LS%20%20GNSS%20Receiver%20%20%28Base%29?unique=50157af)
![[104234-00] Spectra Precision SP60 GNSS receiver (L1 GPS)](/web/image/product.product/663/image_256/%5B104234-00%5D%20Spectra%20Precision%20%20SP60%20GNSS%20receiver%20%20%28L1%20GPS%29?unique=5bc276a)
![[94334-10] Spectra Precision SP80 GNSS receiver (With UHF 430-470 MHz 2w TRx and Survey Office intermediate)](/web/image/product.product/1238/image_256/%5B%E2%80%8E94334-10%5D%20Spectra%20Precision%20SP80%20GNSS%20receiver%20%20%28With%20UHF%20430-470%20MHz%202w%20TRx%20and%20Survey%20Office%20intermediate%29?unique=4e33ed3)
![[119786-00] Spectra-Precision SP85 GNSS receiver (SP85 GNSS Single Receiver Kit)](/web/image/product.product/3390/image_256/%5B119786-00%5D%20Spectra-Precision%20SP85%20GNSS%20receiver%20%20%28SP85%20GNSS%20Single%20Receiver%20Kit%29?unique=f0f704a)
